宁波材料所在绳驱动机器人领域取得进展
工业机器人已被越来越多地替代人类重复性的劳动,并取得了很好的效果。但是随着机器人在各领域的应用逐渐广泛,制造业和社会服务领域的部分应用场合对机器人作业提出了更高的要求,传统的刚性机器人由于驱动装置(包括电机、减速器等)安装于机器人关节处,导致整体机构笨重,且连杆为刚性结构,对人类安全存在潜在威胁,此外,机器人本体刚度大且难于实现柔顺控制,导致其不能很好地适应环境。本质柔性、结构轻量且灵活性高的柔性协作机器人可很好地弥补现有工业机器人的不足,拓展机器人的应用领域。现有的柔性机器人研究大多是采用流体、凝胶、形状记忆等材料,使机器人能够在气压、电流、磁场等外部输入的控制下实现大幅度的拉伸收缩,但是一方面由于机器人的柔顺性和高精度本身是一对矛盾体,大应变的同时必然会导致机器人的控制精度变差,另一方面,由于大的形变很难实现精确测量,因此现有的驱动材料尚无法做到像生物的肌肉组织一样既具有本质的柔性又能具备很好的控制精度和承载能力,从而导致柔性协作机器人无法达到实用化的程度。
中国科学院宁波材料技术与工程研究所精密驱动与机器人团队利用绳索的高效力传导以及具有本质柔性的特点,研发了具有多个关节模块的绳索驱动连续体机器人臂,绳驱动机器人臂采用多根轻质绳索协同驱动,与传统主动关节驱动的机器人臂不同,绳驱动机器人臂是由被动关节支撑,主动绳索驱动,由于主动绳索的驱动装置全都安装在机座上,因此绳驱动机器人臂具有自重轻、转动惯量小和易于实现变刚度控制等优点,既能够产生本质安全的运动,也能达到较高的载重-自重比。
团队研发的绳驱动机器人臂由8个关节模块组成,可实现16自由度的连续弯曲变形,可通过控制绳索的张力来改变机器人臂的刚度,机器人臂的中间则采用了液压软管作为支撑结构,它既可实现连续变形又具有在拉、压、扭转等需要限制变形的方向刚度大的特点,易于实现较高精度的建模与控制。目前,机器人臂驱动绳索张力可达200N,单个关节模块可承载1.5-2Kg,定位精度可控制在2mm以内,机器人臂可承载500g,重复定位精度为10-15mm。
绳驱动连续体机器人臂具有广阔的工业应用前景,如采用多个绳驱动关节模块的超冗余机器人臂可以像蛇一样在狭小的空间操作,从事如飞机发动机内部检测和维修任务等;由于绳索驱动机器人的电机和控制电路远离末端执行器,易于实现与使用环境隔离,也非常适应于环境恶劣的工作场所等。此外,轻量化、模块化的变刚度绳驱动机器人臂也可以应用于社会服务领域,与人类进行安全的交互与协作,实现人机共融。
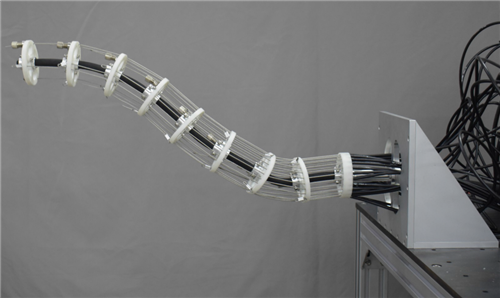
绳驱动连续体机器人臂
(先进制造所 郑天江)