宁波材料所在快速高精度室内建模方面取得进展
室内复杂场景的快速高精度重建在机器人定位与导航、建筑文档数字化以及元宇宙等未来产业中发挥着重要作用。搭载激光雷达和全景相机的便携式移动测量设备能够快速捕获现实场景的几何结构和纹理信息,但在GPS拒止的室内环境中,由于缺乏全局一致的约束,在大尺度、多楼层场景的扫描中,易产生累计误差,严重影响场景模型的精度。如何有效消除定位与建图中的累计误差,已成为该领域的核心难点问题。
中国科学院宁波材料技术与工程研究所计算机视觉团队长期从事高精度室内外三维建模相关的技术研究工作,围绕室内复杂场景的快速高精度建模开展了多项卓有成效的研究。近日,该团队基于建筑物一致的纵向特征以及前沿的大规模非线性优化技术,开发出可实现室内多层建筑亚厘米级精度的建模算法。该方法在室内大规模场景下,连续运动估计的位移误差小于1cm,旋转误差在0.5°以内,精度优于目前国内外提出的同类方法,如图1。
此外,针对数据采集过程中因动态物体干扰易在重建点云中产生“ghost”伪影的问题,该团队提出了一种结合场景体素化与时空状态观测的动态特征评估方法,提高了室内建模结果中动态物体移除的精度和速度,如图2。在大量场景下的测试结果表明,该方法的F1分数稳定在0.9以上,相比于目前最先进的方法有着明显的优势。
上述工作分别以“IPAL: Infinite Planes as Lines for Consistent Mapping in Indoor Multifloor Environments”“FADOR: Fast and Accurate Dynamic Object Removal for Indoor Scenes”为题,发表在学术期刊IEEE Transactions on Instrumentation and Measurement上(DOI: 10.1109/TIM.2024.3353846,DOI: 10.1109/TIM.2024.3427828)。宁波材料所与浙江工业大学合培硕士生金肖枫为第一作者,葛建飞高级工程师为通讯作者。该研究得到了宁波市科技创新2025重大项目(2023Z224、2022Z080)等的支持。
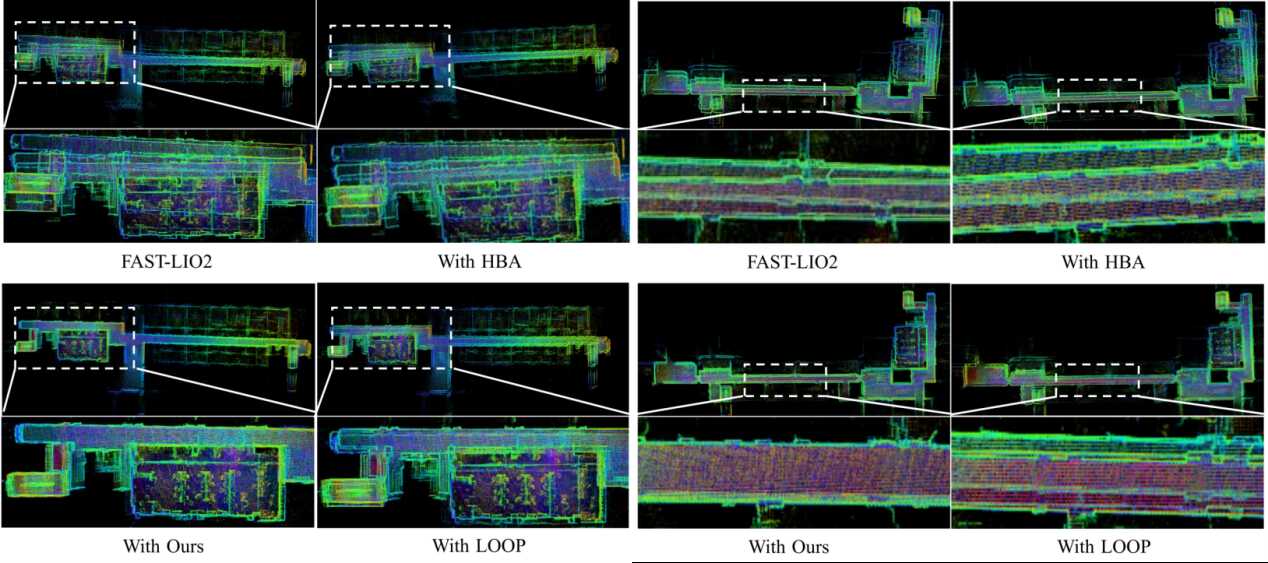
图1 高精度建模算法对比
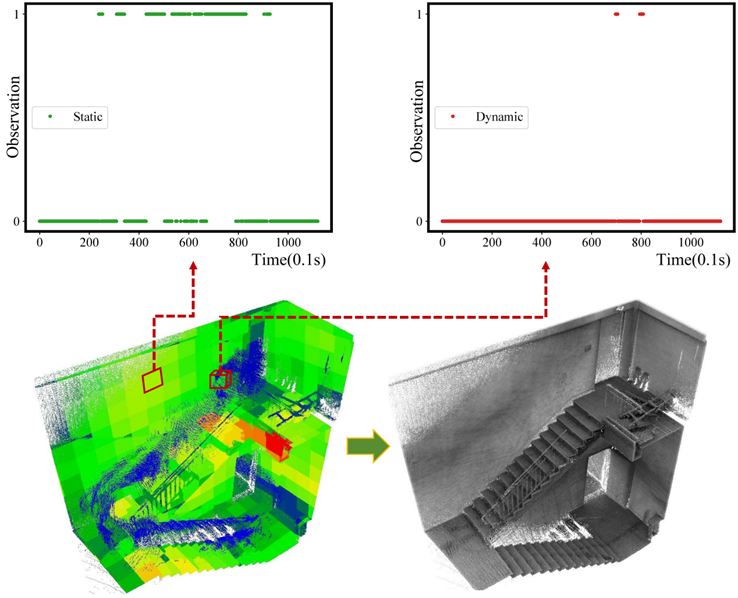
图2 基于时空观测的动态物体滤除算法
(机器人与智能制造装备技术实验室)